Mecanică lagrangiană
| Parte a seriei de articole despre |
| Mecanică clasică |
|---|
|
| Ramuri
|
| Formulări
|
| Subiecte de bază
|
|
| Categorii Mecanică clasică |
|

Prin Mecanică lagrangiană sau ecuațiile lui Lagrange se înțelege o reformulare a mecanicii newtoniene, formulată întâia oară în anul 1788 de matematicianul Joseph Louis Lagrange. Reformularea presupune caracterizarea unui sistem mecanic printr-o singură funcție scalară numită funcția Lagrange a sistemului sau, mai simplu, lagrangianul sistemului. Analiza acestei funcții permite determinarea ecuațiilor de mișcare ale sistemului care, odată rezolvate, relevă toate informațiile necesare analizei dinamicii sistemului.
Lagrangianul
Într-un sistem cu un potențial de forță generalizat și un număr adecvat de constrângeri, lagrangianul este definit ca

unde este energia cinetică a sistemului, iar cea potențială.


Ecuațiile de mișcare
Pentru a caracteriza integral un sistem mecanic cu grade de libertate și constrângeri independente este nevoie de variabile, care se numesc coordonate generalizate și sunt notate cu . Coordonatele generalizate pot fi asociate cu câte o masă din cadrul sistemului mecanic, notate .





Energia cinetică totală a sistemului (notată ) se poate obține deci însumând pătratele vitezelor generalizate (derivatele coordonatelor generalizate după timp, notate ) înmulțite cu jumătatea masei corespunzătoare. Energia potențială poate varia în funcție de natura sistemului mecanic.


Prin ecuațiile de mișcare ale sistemului se înțelege atunci un sistem de ecuații diferențiale (câte una pentru fiecare coordonată generalizată), formulate astfel:

Ecuațiile mai sunt cunoscute sub numele de ecuațiile Euler-Lagrange și rezultă din aplicarea principiului Hamiltonian, conform căruia fiecare sistem mecanic se dezvoltă în timp în așa chip, încât integrala acțiunii să fie minimală.
Proprietăți ale Lagrangianului
Variabile ciclice și simetrii
Dacă lagrangianul nu depinde explicit de vreo coordonată generalizată , atunci aceasta se numește variabilă ciclică sau coordonată ciclică. Prezența în calcul a unei variable ciclice indică prezența în sistem a unei simetrii. Ecuația de mișcare pentru coordonata ia atunci forma mai simplă:


indicând că acea cantitate notată (Impulsul asociat coordonatei ) este o cantitate conservată. Faptul că orice simetrie continuă a unui sistem rezultă în conservarea unei cantități este enunțul principal al Teoremei lui Noether.

Exemple
Masă aflată într-un potențial de forță armonic (conservativ)
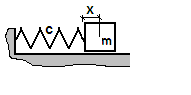
O masă fie conectată prin două arcuri cu constanta de elasticitate la doi pereți ficși. Avem deci o singură coordonată generalizată , anume distanța masei de punctul de echilibru. Pentru acest sistem se determină lagrangianul după definiție. este energia cinetică iar cea potențială:





Lagrangianul este deci diferența:

Se introduce lagrangianul în ecuația de mișcare:

Evaluând expresiile și simplificând avem:

Se obține deci o ecuație diferențială a mișcării:
- .

Soluția acestei ecuații diferențiale de gradul al 2-lea se obține prin Ansatz-ul , fiind timpul, iar frecvența oscilării. Amplitudinea constantă și faza pot fi determinate din condițiile inițiale sau marginale ale sistemului.





Bibliografie
- Nolting, Wolfgang, Grundkurs Theoretische Physik 2: Analytische Mechanik [Elektronische Ressource], Springer-Verlag Berlin Heidelberg (2011), ISBN 978-3-642-12950-6
- Moțoc, Cornelia, Fizica. Bazele fizicii clasice, Editura All, 1998











