Moment cinétique spécifique
En mécanique céleste, le moment cinétique spécifique joue un rôle important pour la solution du problème à deux corps. On peut démontrer que ce vecteur est constant pour une orbite dans des conditions idéales. Ceci mène directement à la deuxième loi de Kepler.

Cet article traite du moment cinétique spécifique parce qu'il ne s'agit pas du moment cinétique proprement dit, mais du moment cinétique par unité de masse


pour être exact la masse réduite . Son unité SI est donc m2·s−1.

Conditions préalables
Certaines conditions, déjà connues de la loi universelle de la gravitation selon Newton, doivent d'abord être posées pour simplifier ce qui suit.
Deux masses ponctuelles et sont situées dans le vide à la distance l'une de l'autre. Seule la force de gravitation agit, instantanément et quelle que soit la distance. Le système de coordonnées est inertiel.




En plus il est supposé que . Il y a donc , le corps central, à l'origine du système de coordonnées et le satellite qui tourne autour. La masse réduite est égale à . L'équation du problème à deux corps


décrit le mouvement. est le paramètre gravitationnel standard et (valeur absolue ) est le vecteur de distance qui pointe depuis le corps central au satellite parce que la masse du satellite est négligeable[Notes 1].


Il est important de ne pas confondre le paramètre gravitationnel standard avec la masse réduite dont le symbole est souvent également.

Moment cinétique spécifique



On obtient le moment cinétique spécifique en multipliant l'équation du problème à deux corps avec le vecteur selon un produit vectoriel

Le produit vectoriel d'un vecteur avec lui-même (côté droit de l'équation) est 0. Le côté gauche se simplifie comme suit selon la règle du produits des dérivées

Cela veut dire que est constant (grandeur conservée). Ce vecteur est justement le moment cinétique par unité de masse du satellite [Références 1]


Ce vecteur est perpendiculaire à l'orbite. L'orbite reste donc dans le même plan parce que le moment cinétique est constant.
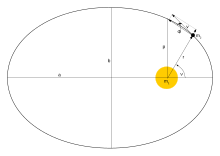
D'autres conclusions du problème à deux corps se laissent raisonner d'après le moment cinétique spécifique avec les définitions de l'angle de vol et des composantes transversale et radiale du vecteur de vitesse (voir la figure à droite). Les trois prochaines formules sont toutes des méthodes équivalentes pour calculer la valeur absolue du mouvement cinétique spécifique



Lois de Kepler
Article détaillé : Lois de Kepler.
Les lois de Kepler peuvent être démontrées presque directement de la dérivation du moment cinétique spécifique.
Première loi
La démonstration commence de nouveau de l'équation du problème à deux corps. Cette fois ci elle est multipliée (produit vectoriel) avec le moment cinétique spécifique

Le côté gauche de l'équation est égal à parce que le moment cinétique est constant.

Après quelques calculs on obtient pour le côté droit

Former l'équation et intégrer

avec la constante d'intégration .

Si on multiplie (produit scalaire) cette équation avec on obtient


Il en sort finalement l'équation du mouvement képlérien [Références 2]

qui est l'équation polaire d'une conique avec le demi-paramètre et l'excentricité . Ceci démontre la première loi de Kepler, en mots :


« Les planètes décrivent une ellipse dont le Soleil occupe l'un des foyers. »
— Johannes Kepler , Astronomia nova aitiologetos seu Physica coelestis[Références 3]
Deuxième loi
La deuxième des trois équations pour la valeur absolue du mouvement cinétique spécifique mène directement à la deuxième loi de Kepler.
Si l'on combine la recomposition de l'équation avec le rapport que l'aire d'un secteur avec un angle infiniment petit est égale à (triangle avec un côté très petit), le résultat est[Références 4]




l'équation qui va avec la loi formulée en mots :
« Le rayon Soleil-planète balaie des aires égales pendant des intervalles de temps égaux. »
— Johannes Kepler , Astronomia nova aitiologetos seu Physica coelestis[Références 3]
Troisième loi
La troisième loi de Kepler est une conséquence de la deuxième loi. Si on intègre l'équation sur une révolution on obtient la période de révolution

pour l'aire d'une ellipse. Si l'on remplace le demi-petit axe avec et le moment cinétique spécifique avec le résultat est [Références 4]



Cela veut dire qu'il y a une relation fonctionnelle entre la période de révolution et le demi-grand axe qui se réduit à une constante du corps central. Ceci équivaut à la formulation plus connue de la loi :
« Le carré de la période de révolution est proportionnel au cube du demi grand-axe de l'orbite. »
— Johannes Kepler , Harmonices Mundi libri V[Références 3]
Articles connexes
- Énergie orbitale spécifique, une autre unité de conservation du problème à deux corps.
Notes
- ↑ On n'est pas obligé de faire cette supposition pour dériver le moment cinétique spécifique. Alors l'origine du système de coordonnées est le barycentre, le paramètre gravitationnel standard et reste la masse réduite (pas ). Mais cette simplification est bonne dans la plupart des cas et les démonstrations des lois de Kepler sont plus évidentes.


Références
- ↑ (en) David A. Vallado, Fundamentals of Astrodynamics and Applications, Hawthorne, CA, Micorcosm Press, , 1106 p. (ISBN 9781881883180), p. 24
- ↑ (en) David A. Vallado, Fundamentals of Astrodynamics and Applications, Hawthorne, CA, Micorcosm Press, , 1106 p. (ISBN 9781881883180), p. 28
- ↑ a b et c « Les lois de kepler », sur eduscol.education.fr (consulté le )
- ↑ a et b (en) David A. Vallado, Fundamentals of Astrodynamics and Applications, Hawthorne, CA, Micorcosm Press, , 1106 p. (ISBN 9781881883180), p. 30













 Portail de l’astronautique
Portail de l’astronautique  Portail de l’astronomie
Portail de l’astronomie











