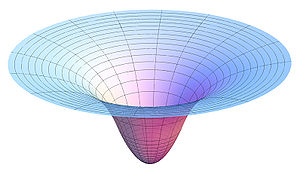
均一な球体の周りの重力ポテンシャルの 2次元でスライスしプロットした図、変曲点 は、球体の表面にある。 重力ポテンシャル (じゅうりょくポテンシャル、英語 : gravitational potential )とは、ニュートン力学 において、ある点における単位質量 あたりの重力 による位置エネルギー のことである[1] 空間 内のある位置 へ質点 を基準点から動かす際に重力が質点に行う単位質量あたりの仕事の符号を変えたものに等しい。
通常は無限遠を重力ポテンシャルの基準点(重力ポテンシャルが 0 となる点)として選ぶ。このとき、重力は常に引力として作用するため、有限の距離では重力ポテンシャルは負の値をとる。重力ポテンシャルは単位質量あたりのエネルギー(つまり速度の二乗)の次元を持ち、MKSA単位系 では [J/kg] または [m2 /s2 ] という単位の物理量として表される.
数学では、重力ポテンシャルはニュートンポテンシャル(英語版) とも呼ばれ、ポテンシャル論 の研究において基本的である。
位置エネルギーと重力ポテンシャル 重力ポテンシャルとは単位質量あたりの位置エネルギー に等しいから、位置 r {\displaystyle {\boldsymbol {r}}} m {\displaystyle m} 位置エネルギー U ( r ) {\displaystyle U({\boldsymbol {r}})} Φ ( r ) {\displaystyle \Phi ({\boldsymbol {r}})}
U ( r ) = m Φ ( r ) {\displaystyle U({\boldsymbol {r}})=m\Phi ({\boldsymbol {r}})} という関係にある。それ故に、この粒子に働く力 F ( r ) {\displaystyle {\boldsymbol {F}}({\boldsymbol {r}})}
F ( r ) = − ∇ U ( r ) = − m ∇ Φ ( r ) {\displaystyle {\boldsymbol {F}}({\boldsymbol {r}})=-{\boldsymbol {\nabla }}U({\boldsymbol {r}})=-m{\boldsymbol {\nabla }}\Phi ({\boldsymbol {r}})} と書くことができる[2] 重力加速度 g {\displaystyle {\boldsymbol {g}}} [3]
g ( r ) = − ∇ Φ ( r ) {\displaystyle {\boldsymbol {g}}({\boldsymbol {r}})=-{\boldsymbol {\nabla }}\Phi ({\boldsymbol {r}})} 逆に、重力ポテンシャル Φ {\displaystyle \Phi } [4]
Φ ( r ) = − 1 m ∫ ∞ r F ( r ′ ) ⋅ d r ′ {\displaystyle \Phi ({\boldsymbol {r}})=-{\frac {1}{m}}\int _{\infty }^{\boldsymbol {r}}{\boldsymbol {F}}({\boldsymbol {r}}')\cdot d{\boldsymbol {r}}'} 例えば一様重力場中では、重力加速度の向きを z 軸負の向きに選ぶとき (つまり鉛直 上向きを z 軸とする)、重力ポテンシャル Φ {\displaystyle \Phi } Φ ( z ) = g z {\displaystyle \Phi (z)=gz} [5] Δ h {\displaystyle \Delta h} m {\displaystyle m} Δ U {\displaystyle \Delta U} Δ U = m g Δ h {\displaystyle \Delta U=mg\Delta h}
脱出速度と円軌道速度 ある天体 がつくる重力ポテンシャルを Φ ( r ) {\displaystyle \Phi ({\boldsymbol {r}})} r {\displaystyle {\boldsymbol {r}}} E = 1 2 v 2 + Φ ( r ) {\displaystyle E={\frac {1}{2}}{\boldsymbol {v}}^{2}+\Phi ({\boldsymbol {r}})}
v e s c = − 2 Φ ( r ) {\displaystyle v_{\mathrm {esc} }={\sqrt {-2\Phi ({\boldsymbol {r}})}}} を位置 r {\displaystyle {\boldsymbol {r}}} 脱出速度 と呼ぶ[6] [7] Φ ( r ) {\displaystyle \Phi (r)} r {\displaystyle r}
v c = r ∂ r Φ ( r ) {\displaystyle v_{\mathrm {c} }={\sqrt {r\partial _{r}\Phi (r)}}} を円軌道速度 と呼ぶ[7]
質量分布と重力ポテンシャル 質量 M {\displaystyle M} 点粒子 が位置 r {\displaystyle {\boldsymbol {r}}} Φ ( r ) {\displaystyle \Phi ({\boldsymbol {r}})} ニュートンの逆二乗則 g = − G M r / | r | 3 {\displaystyle {\boldsymbol {g}}=-GM{\boldsymbol {r}}/|{\boldsymbol {r}}|^{3}}
Φ ( r ) = − G M | r | {\displaystyle \Phi ({\boldsymbol {r}})=-{\frac {GM}{|{\boldsymbol {r}}|}}} と書ける[8] G {\displaystyle G} 重力定数 である。このとき重力ポテンシャルは常に負であり、 r → ∞ {\displaystyle r\to \infty } r → 0 {\displaystyle r\to 0} r − 1 {\displaystyle r^{-1}}
より一般に、任意の質量分布(英語版) に伴う重力ポテンシャルは各質量要素がつくるポテンシャルを足し上げたものに等しい。例えば N {\displaystyle N} M i {\displaystyle M_{i}} i = 1 , 2 , ⋯ , N {\displaystyle i=1,2,\cdots ,N} r i {\displaystyle {\boldsymbol {r}}_{i}}
Φ ( r ) = − ∑ i = 1 N G M i | r − r i | {\displaystyle \Phi ({\boldsymbol {r}})=-\sum _{i=1}^{N}{\frac {GM_{i}}{|{\boldsymbol {r}}-{\boldsymbol {r}}_{i}|}}} となる。
点 x と r とする。r は質量分布(灰色)の中に含まれ、微分された質量 dm(r ) は点 r に位置するとする。 質量分布が3次元ユークリッド空間 R 3 {\displaystyle \mathbb {R} ^{3}} d M = ρ ( r ) d 3 r {\displaystyle dM=\rho ({\boldsymbol {r}})d^{3}r} [3]
Φ ( r ) = − ∫ G ρ ( r ′ ) | r − r ′ | d 3 r ′ {\displaystyle \Phi ({\boldsymbol {r}})=-\int {\frac {G\rho ({\boldsymbol {r}}')}{|{\boldsymbol {r}}-{\boldsymbol {r}}'|}}d^{3}r'} この関係式は、重力ポテンシャル Φ {\displaystyle \Phi } ρ {\displaystyle \rho } ポアソン方程式
∇ 2 Φ = 4 π G ρ {\displaystyle \nabla ^{2}\Phi =4\pi G\rho } により結びついていることを意味する[9] ∇ 2 {\displaystyle \nabla ^{2}} ラプラシアン である。実際、上の Φ {\displaystyle \Phi } グリーン関数 を用いた積分表示に等しい[10]
球対称系 球対称な質量分布 ρ = ρ ( r ) {\displaystyle \rho =\rho (r)} Φ {\displaystyle \Phi } r {\displaystyle r}
1 r 2 d d r ( r 2 d Φ d r ) = 4 π G ρ {\displaystyle {\frac {1}{r^{2}}}{\frac {d}{dr}}\left(r^{2}{\frac {d\Phi }{dr}}\right)=4\pi G\rho } と書き直せる。これはただちに積分できて、重力加速度 g = − ∂ r Φ {\displaystyle g=-\partial _{r}\Phi } Φ {\displaystyle \Phi }
g ( r ) = − G M ( r ) r 2 , Φ ( r ) = − ∫ r ∞ G M ( r ′ ) r ′ 2 d r ′ {\displaystyle g(r)=-{\frac {GM(r)}{r^{2}}},\ \ \Phi (r)=-\int _{r}^{\infty }{\frac {GM(r')}{r'^{2}}}dr'} と求まる[7] M ( r ) {\displaystyle M(r)} r {\displaystyle r}
M ( r ) = ∫ 0 r 4 π r ′ 2 ρ ( r ′ ) d r ′ {\displaystyle M(r)=\int _{0}^{r}4\pi r'^{2}\rho (r')dr'} である。特に、この重力加速度 g ( r ) {\displaystyle g(r)} r = 0 {\displaystyle r=0} M ( r ) {\displaystyle M(r)} [11]
半径 R {\displaystyle R} ρ {\displaystyle \rho } Φ {\displaystyle \Phi }
Φ ( r ) = { − 2 3 π G ρ ( 3 R 2 − r 2 ) r ≤ R − 4 π G ρ R 3 / 3 r r ≥ R {\displaystyle \Phi (r)={\begin{cases}-{\frac {2}{3}}\pi G\rho (3R^{2}-r^{2})&r\leq R\\-4\pi G\rho R^{3}/3r&r\geq R\end{cases}}} が得られる[12]
多重極展開 質量分布が有界な領域に限られるとき、その外部の真空領域での重力ポテンシャルは、球座標 ( r , θ , φ ) {\displaystyle (r,\theta ,\varphi )}
Φ ( r , θ , φ ) = − G ∑ l = 0 ∞ ∑ m = − l l 4 π 2 l + 1 Q l m r l + 1 Y l m ( θ , φ ) {\displaystyle \Phi (r,\theta ,\varphi )=-G\sum _{l=0}^{\infty }\sum _{m=-l}^{l}{\frac {4\pi }{2l+1}}{\frac {Q_{lm}}{r^{l+1}}}Y_{lm}(\theta ,\varphi )} という形に表すことができる[13] [14] Y l m {\displaystyle Y_{lm}} 球面調和関数 であり、 Q l m {\displaystyle Q_{lm}}
Q l m = ∫ r l ρ ( r , θ , φ ) Y l m ∗ ( θ , φ ) r 2 d r sin θ d θ d φ {\displaystyle Q_{lm}=\int r^{l}\rho (r,\theta ,\varphi )Y_{lm}^{*}(\theta ,\varphi )\,r^{2}dr\,\sin \theta d\theta \,d\varphi } である。0 次の多重極モーメント Q 00 {\displaystyle Q_{00}} M {\displaystyle M} Q 1 m = 0 {\displaystyle Q_{1m}=0} [13] − G M / r {\displaystyle -GM/r} Q 2 m {\displaystyle Q_{2m}} 2 l {\displaystyle 2^{l}} Q l m {\displaystyle Q_{lm}} O ( M R l ) {\displaystyle {\mathcal {O}}(MR^{l})} R {\displaystyle R} 2 l {\displaystyle 2^{l}} Q l m {\displaystyle Q_{lm}} O { ( R / r ) l } {\displaystyle {\mathcal {O}}\left\{\left(R/r\right)^{l}\right\}} [14]
特に地球 のように軸対称な系の場合、多重極モーメント Q l m {\displaystyle Q_{lm}} m ≠ 0 {\displaystyle m\neq 0} ルジャンドル多項式 P l {\displaystyle P_{l}}
Φ ( r , θ , φ ) = − G M r { 1 − ∑ l = 2 ∞ J l ( R r ) l P l ( cos θ ) } {\displaystyle \Phi (r,\theta ,\varphi )=-{\frac {GM}{r}}\left\{1-\sum _{l=2}^{\infty }J_{l}\left({\frac {R}{r}}\right)^{l}P_{l}(\cos \theta )\right\}} と書ける[15]
一般相対論 一般相対論 では重力場 は計量テンソル により表される。重力場が弱く、かつ重力源の速度が光速 より十分遅い極限で一般相対論はニュートン重力を再現し、計量テンソルと重力ポテンシャルは
d s 2 = − ( 1 + 2 Φ c 2 ) c 2 d t 2 + ( 1 − 2 Φ c 2 ) ( d x 2 + d y 2 + d z 2 ) {\displaystyle ds^{2}=-\left(1+{\frac {2\Phi }{c^{2}}}\right)c^{2}dt^{2}+\left(1-{\frac {2\Phi }{c^{2}}}\right)(dx^{2}+dy^{2}+dz^{2})} という関係で結ばれる[16] 時間の遅れ や重力赤方偏移 [17] 重力レンズ [18]
脚注 [脚注の使い方 ]
^ 『重力ポテンシャル』 - 天文学辞典(日本天文学会 ) ^ 「シリーズ現代の天文学13 天体の位置と運動」日本評論社, 2009. ISBN 978-4-535-60733-0. pp.100-102. ^ a b Binney & Tremaine, (2008). Galactic Dynamics (Second ed.). Princeton University Press. ISBN 978-0-691-13027-9. pp. 56-60. ^ 戸田 盛和, 「力学 (物理入門コース1)」, 岩波書店, 1982. ISBN 4-00-007641-8. pp. 71-74. ^ 戸田 盛和, 「力学 (物理入門コース1)」, 岩波書店, 1982. ISBN 4-00-007641-8. pp. 46. ^ 『宇宙速度』 - 天文学辞典(日本天文学会 ) ^ a b c Binney & Tremaine, (2008). Galactic Dynamics (Second ed.). Princeton University Press. ISBN 978-0-691-13027-9. pp. 62-63. ^ 篠本滋, 坂口英継「力学 (基幹講座物理学)」東京図書, 2013. ISBN 978-4-489-02163-3. pp. 77-79 ^ 「シリーズ現代の天文学13 天体の位置と運動」日本評論社, 2009. ISBN 978-4-535-60733-0. pp.111-115. ^ 「シリーズ現代の天文学13 天体の位置と運動」日本評論社, 2009. ISBN 978-4-535-60733-0. pp.115-117. ^ 「シリーズ現代の天文学13 天体の位置と運動」日本評論社, 2009. ISBN 978-4-535-60733-0. pp.108-111. ^ Binney & Tremaine, (2008). Galactic Dynamics (Second ed.). Princeton University Press. ISBN 978-0-691-13027-9. pp. 63-65. ^ a b Binney & Tremaine, (2008). Galactic Dynamics (Second ed.). Princeton University Press. ISBN 978-0-691-13027-9. pp. 78-83. ^ a b 「シリーズ現代の天文学13 天体の位置と運動」日本評論社, 2009. ISBN 978-4-535-60733-0. pp.117-119. ^ 木下 宙「天体と軌道の力学」東京大学出版会, 1998. ISBN 978-4-13-060721-6. pp. 181-182. ^ 田中貴浩『深化する一般相対論 ブラックホール・重力波・宇宙論』丸善出版, 2017年. ISBN 978-4621302316. p. 40. ^ L.D.ランダウ, E.M.リフシッツ『場の古典論』東京図書〈理論物理学教程〉, 1978年. ISBN 4-489-01161-X. p.276-279, ^ Peter Schneider, Juergen Ehlers, Emilio E. Falco, Gravitational Lenses (Astronomy and Astrophysics Library) , Springer, 2009. ISBN 978-3-540-66506-9. pp. 123. 関連項目