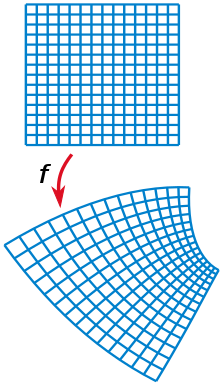
矩形格子(上)と等角写像 f によるその像(下)。f が、90°で交差している2つの直線をなおも90°で交差している2つの曲線へ移していることが確認できる。 等角写像 (とうかくしゃぞう、英 : conformal transformation ユークリッド空間 からユークリッド空間への写像 であって、任意の点の近傍の微小な2つの線分が、その成す角を保存するように写像されるものをいう。いいかえれば、座標変換の関数行列 が回転行列 のスカラー倍となるものである。すなわち、平面上の一つの図形を他の図形に変換(写像)したとき、図形上の二曲線の交角はその写像によっても等しく保たれるような写像を等角写像と呼ぶ。
一見すると、原形から大きく図形が変わったように見えても、対応する微小部分に注目すると、原形の図形と相似になっているのが、等角写像である。等角写像は、複素関数論 と深い関係があり、工学上、流体の挙動の記述などにおいて非常に有用である[1]
複素関数の等角写像 複素平面 z から複素平面 w への写像である関数 w = f (z ) について、正則関数 は等角写像である。逆命題も成り立つ[2]
関数 f によって点 z 0 とその近傍にある2点 z 1 , z 2 が点 w 0 とその近傍にある2点 w 1 , w 2 に写像されるとき、f が正則ならば
lim z 1 → z 0 w 1 − w 0 z 1 − z 0 = lim z 2 → z 0 w 2 − w 0 z 2 − z 0 = f ′ ( z 0 ) . . . ( 1 ) {\displaystyle \lim _{z_{1}\to z_{0}}{\frac {w_{1}-w_{0}}{z_{1}-z_{0}}}=\lim _{z_{2}\to z_{0}}{\frac {w_{2}-w_{0}}{z_{2}-z_{0}}}=f'(z_{0})...(1)} ここで z 0 = | z 0 | exp ( i arg ( z 0 ) ) {\displaystyle z_{0}=|z_{0}|\exp(i\arg(z_{0}))\,\!}
lim | w 1 − w 0 | | w 2 − w 0 | e i arg ( w 1 − w 2 ) = lim | z 1 − z 0 | | z 2 − z 0 | e i arg ( z 1 − z 2 ) {\displaystyle \lim {\frac {|w_{1}-w_{0}|}{|w_{2}-w_{0}|}}e^{i\arg(w_{1}-w_{2})}=\lim {\frac {|z_{1}-z_{0}|}{|z_{2}-z_{0}|}}e^{i\arg(z_{1}-z_{2})}} この式の偏角をとれば
lim arg ( w 1 − w 2 ) = lim arg ( z 1 − z 2 ) {\displaystyle \lim \arg(w_{1}-w_{2})=\lim \arg(z_{1}-z_{2})} すなわち、全ての正則関数による写像は微小な角を保存する。また、(1) の絶対値は
| d w d z | = | f ′ ( z ) | {\displaystyle \left|{\frac {dw}{dz}}\right|=|f'(z)|} であり、これは微小線分の拡大率がその方向によらないことを示している。
地図投影法の等角写像 地図投影法 のうち等角写像であるものが正角図法 と呼ばれる。
球面の場合 球面からの投影法は通常は球座標から地図上の座標への写像 m : ( φ , λ ) → ( x , y ) {\displaystyle m:(\varphi ,\lambda )\to (x,y)}
( ∂ x ∂ φ 1 cos φ ∂ x ∂ λ ∂ y ∂ φ 1 cos φ ∂ y ∂ λ ) {\displaystyle {\begin{pmatrix}{\frac {\partial x}{\partial \varphi }}&{\frac {1}{\cos \varphi }}{\frac {\partial x}{\partial \lambda }}\\{\frac {\partial y}{\partial \varphi }}&{\frac {1}{\cos \varphi }}{\frac {\partial y}{\partial \lambda }}\\\end{pmatrix}}} が回転行列のスカラー倍となるものが等角写像である。
冒頭の定義との関係では、球面に任意の点で接する接平面に直交座標系 ( ξ , η ) {\displaystyle (\xi ,\eta )\,\!} f : ( ξ , η ) → ( x , y ) {\displaystyle f:(\xi ,\eta )\to (x,y)} g : ( ξ , η ) → ( φ , λ ) {\displaystyle g:(\xi ,\eta )\to (\varphi ,\lambda )} m {\displaystyle m\,\!}
J f = J m J g = ( ∂ x ∂ λ ∂ x ∂ φ ∂ y ∂ λ ∂ y ∂ φ ) ( ∂ λ ∂ ξ ∂ λ ∂ η ∂ φ ∂ ξ ∂ φ ∂ η ) = ( ∂ x ∂ λ ∂ x ∂ φ ∂ y ∂ λ ∂ y ∂ φ ) ( 1 a cos φ 0 0 1 a ) {\displaystyle J_{f}=J_{m}J_{g}={\begin{pmatrix}{\frac {\partial x}{\partial \lambda }}&{\frac {\partial x}{\partial \varphi }}\\{\frac {\partial y}{\partial \lambda }}&{\frac {\partial y}{\partial \varphi }}\\\end{pmatrix}}{\begin{pmatrix}{\frac {\partial \lambda }{\partial \xi }}&{\frac {\partial \lambda }{\partial \eta }}\\{\frac {\partial \varphi }{\partial \xi }}&{\frac {\partial \varphi }{\partial \eta }}\\\end{pmatrix}}={\begin{pmatrix}{\frac {\partial x}{\partial \lambda }}&{\frac {\partial x}{\partial \varphi }}\\{\frac {\partial y}{\partial \lambda }}&{\frac {\partial y}{\partial \varphi }}\\\end{pmatrix}}{\begin{pmatrix}{\frac {1}{a\cos \varphi }}&0\\0&{\frac {1}{a}}\\\end{pmatrix}}} として得られる。
回転楕円体から球への等角写像 回転楕円体 (扁球 )からの投影法についても同様にして等角写像を定義することができるが、投影法の表式に楕円積分 を含むこととなり、解析的に求めることが難しい場合があるので、かつては既に知られた回転楕円体から球面への等角写像によって回転楕円体上の地物を球面に写像した後、球面からの正角図法で地図に投影することが行われた(二重投影)。
最も簡単なものは経度 を変えないもので、地球楕円体 の離心率 を e {\displaystyle e\,\!} φ {\displaystyle \varphi \,\!} χ {\displaystyle \chi \,\!}
χ = gd ( gd − 1 ( φ ) − e tanh − 1 ( e sin φ ) ) {\displaystyle \chi =\operatorname {gd} \left(\operatorname {gd} ^{-1}(\varphi )-e\tanh ^{-1}(e\sin \varphi )\right)} ただし、 gd ( x ) {\displaystyle \operatorname {gd} (x)} グーデルマン関数 であり、 gd − 1 ( x ) {\displaystyle \operatorname {gd} ^{-1}(x)} 逆関数 を表す。
もうひとつの方法は経度方向に拡大を行う(つまり全球を写像すると重なりが出てしまう)代わりに緯度方向の縮尺 の変化を抑えようとしたものである。投影しようとする範囲の中心地点の地理緯度を φ 0 {\displaystyle \varphi _{0}\,\!} λ 0 {\displaystyle \lambda _{0}\,\!} 微分係数 を0とする条件を課したとき、地球楕円体上の点 P ( φ , λ ) {\displaystyle P(\varphi ,\lambda )\,\!} P ′ ( Φ , Λ ) {\displaystyle P'(\Phi ,\Lambda )\,\!} [3]
Φ = gd ( α { gd − 1 ( φ ) − gd − 1 ( φ 0 ) − e tanh − 1 ( e sin φ ) + e tanh − 1 ( e sin φ 0 ) } + tanh − 1 ( sin φ 0 α ) ) Λ = α ( λ − λ 0 ) α = 1 + e 2 cos 4 φ 0 1 − e 2 {\displaystyle {\begin{aligned}\Phi &=\operatorname {gd} \left(\alpha \left\{\operatorname {gd} ^{-1}(\varphi )-\operatorname {gd} ^{-1}(\varphi _{0})-e\tanh ^{-1}(e\sin \varphi )+e\tanh ^{-1}(e\sin \varphi _{0})\right\}+\tanh ^{-1}\left({\frac {\sin \varphi _{0}}{\alpha }}\right)\right)\\\Lambda &=\alpha (\lambda -\lambda _{0})\\\alpha &={\sqrt {1+{\frac {e^{2}\cos ^{4}\varphi _{0}}{1-e^{2}}}}}\\\end{aligned}}} この投影法はガウス 正角二重投影 (Gauss conformal double projection) と呼ばれ、戦前の日本においてもこの方法により平面直角座標系(旧座標系)が形成されていた。
回転楕円体から平面への等角写像 このうち最も重要なもののひとつは、投影しようとする範囲の中心地点を通る子午線 (中央子午線)の子午線弧 長を保存するものである。これは、今日ではガウス・クリューゲル図法 と呼ばれるもの[4] 平面直角座標系 (平成14年 国土交通省 告示 第9号)[1]にも採用されている。
かつて日本で一般的に用いられていた方法は、中央子午線からの経度差が小さい範囲に限って当該差について冪級数 展開したもの[3] 扁平率 のみを係数に含む冪級数展開により表されるもの[5] 公共測量 における作業規程の準則[2]において、また国土地理院 が提供する測量計算サイト[3]においても採用されることとなった[4], [5]。
地球表面全体を完全に投影するには、ヤコビの楕円函数 を駆使した表式[6]
引用文献 ^ 今井功 (1989): 複素解析と流体力学, 日本評論社, 東京. ISBN 4535606013 ^ Меньшов, Д. Е. (1936): Les conditions de monogénéité, Hermann & cie, Paris. OCLC 6698975 ^ a b 小牧和雄 (1988): 回転楕円体に準拠した空間座標の決定, 現代測量学, 第4巻, 測地測量①, 日本測量協会, 東京, 第4章. ^ Krüger, L. (1912): Konforme Abbildung des Erdellipsoids in der Ebene , Veröffentlichung Königlich Preuszischen geodätischen Institutes, Neue Folge, 52 , Druck und Verlag von B. G. Teubner, Potsdam. ^ 河瀬和重 (2011): Gauss-Krüger投影における経緯度座標及び平面直角座標相互間の座標換算についてのより簡明な計算方法, 国土地理院時報, 121 , 109–124. ^ Ludwig, K. (1943): Die der transversalen Mercatorkarte der Kugel entsprechende Abbildung des Rotationsellipsoids , Journal für die reine und angewandte Mathematik, 185 (4), 193–230. 関連項目 典拠管理データベース
全般 国立図書館 スペイン フランス BnF data ドイツ イスラエル アメリカ 日本 チェコ その他