多重解像度解析 (たじゅうかいぞうどかいせき、英 : multiresolution analysis, MRA )とは、2倍毎の解像度のウェーブレット を用いて離散ウェーブレット変換 により解析する手法。スケーリング関数で基底展開 された信号列を、半分の解像度のスケーリング関数とウェーブレット関数による基底展開の和に分解する。1989年に Stephane G. Mallat が発表した[1]
本来は異なる物だが、Mathematica [2] MATLAB [3] 離散ウェーブレット変換 の項目を参照。
概要 関数 f j ( x ) {\displaystyle f_{j}(x)} ϕ {\displaystyle \phi }
f j ( x ) = ∑ k c k ( j ) 2 j / 2 ϕ ( 2 j x − k ) = ∑ k c k ( j ) ϕ j , k ( x ) {\displaystyle f_{j}(x)=\sum _{k}c_{k}^{(j)}2^{j/2}\phi (2^{j}x-k)=\sum _{k}c_{k}^{(j)}\phi _{j,k}(x)} 下記のウェーブレット関数 ψ {\displaystyle \psi }
g j ( x ) = ∑ k d k ( j ) 2 j / 2 ψ ( 2 j x − k ) = ∑ k d k ( j ) ψ j , k ( x ) {\displaystyle g_{j}(x)=\sum _{k}d_{k}^{(j)}2^{j/2}\psi (2^{j}x-k)=\sum _{k}d_{k}^{(j)}\psi _{j,k}(x)} 関数 f j ( x ) {\displaystyle f_{j}(x)}
f j ( x ) = g j − 1 ( x ) + g j − 2 ( x ) + ⋯ + g j − m ( x ) + f j − m ( x ) {\displaystyle f_{j}(x)=g_{j-1}(x)+g_{j-2}(x)+\cdots +g_{j-m}(x)+f_{j-m}(x)} 下記関数集合が基底関数 として使われる。
{ ϕ j − m , k ( t ) , ψ j − m , k ( t ) , ⋯ , ψ j − 1 , k ( t ) ∣ k ∈ Z } {\displaystyle \{\phi _{j-m,k}(t),\psi _{j-m,k}(t),\cdots ,\psi _{j-1,k}(t)\mid k\in \mathbf {Z} \}} スケーリング関数とウェーブレット関数の間にはトゥースケール関係が成立する事が必要である。
トゥースケール関係 以下の関係が成立する場合、トゥースケール関係と呼ぶ。
ϕ ( x ) = ∑ k ∈ Z p k ϕ ( 2 x − k ) {\displaystyle \phi (x)=\sum _{k\in \mathbf {Z} }p_{k}\phi (2x-k)} ψ ( x ) = ∑ k ∈ Z q k ϕ ( 2 x − k ) {\displaystyle \psi (x)=\sum _{k\in \mathbf {Z} }q_{k}\phi (2x-k)} p k , q k {\displaystyle p_{k},q_{k}} ハールウェーブレット の場合は、 p 0 = p 1 = q 0 = 1 , q 1 = − 1 {\displaystyle p_{0}=p_{1}=q_{0}=1,\ q_{1}=-1}
トゥースケール関係が成立していると、下記の式が成立する。
ϕ ( 2 x − l ) = 1 2 ∑ k ∈ Z ( g 2 k − l ϕ ( x − k ) + h 2 k − l ψ ( x − k ) ) , l ∈ Z {\displaystyle \phi (2x-l)={\frac {1}{2}}\sum _{k\in \mathbf {Z} }(g_{2k-l}\phi (x-k)+h_{2k-l}\psi (x-k)),\quad l\in \mathbf {Z} } { g k } , { h k } {\displaystyle \{g_{k}\},\{h_{k}\}} g k = p ¯ − k , h k = q ¯ − k {\displaystyle g_{k}={\overline {p}}_{-k},\ h_{k}={\overline {q}}_{-k}}
分解数列が分かると、 f j ( x ) = g j − 1 ( x ) + f j − 1 ( x ) {\displaystyle f_{j}(x)=g_{j-1}(x)+f_{j-1}(x)}
2次元 2次元の場合は、まず、関数 f j ( x , y ) {\displaystyle f_{j}(x,y)} ϕ {\displaystyle \phi }
f j ( x , y ) = ∑ k 1 ∑ k 2 c k 1 , k 2 ( j ) 2 j ϕ ( 2 j x − k 1 ) ϕ ( 2 j y − k 2 ) = ∑ k 1 ∑ k 2 c k 1 , k 2 ( j ) ϕ j , k 1 ( x ) ϕ j , k 2 ( y ) {\displaystyle f_{j}(x,y)=\sum _{k_{1}}\sum _{k_{2}}c_{k_{1},k_{2}}^{(j)}2^{j}\phi (2^{j}x-k_{1})\phi (2^{j}y-k_{2})=\sum _{k_{1}}\sum _{k_{2}}c_{k_{1},k_{2}}^{(j)}\phi _{j,k_{1}}(x)\phi _{j,k2}(y)} ϕ j , k 1 ( x ) ϕ j , k 2 ( y ) {\displaystyle \phi _{j,k_{1}}(x)\phi _{j,k_{2}}(y)}
ϕ j , k 1 ( x ) {\displaystyle \phi _{j,k_{1}}(x)} ϕ j − 1 , k 1 ( x ) {\displaystyle \phi _{j-1,k_{1}}(x)} ψ j − 1 , k 1 ( x ) {\displaystyle \psi _{j-1,k_{1}}(x)} ϕ j , k 2 ( y ) {\displaystyle \phi _{j,k_{2}}(y)} ϕ j − 1 , k 2 ( y ) {\displaystyle \phi _{j-1,k_{2}}(y)} ψ j − 1 , k 2 ( y ) {\displaystyle \psi _{j-1,k_{2}}(y)} 合わせて、
{ ϕ j − 1 , k 1 ( x ) ϕ j − 1 , k 2 ( y ) , ϕ j − 1 , k 1 ( x ) ψ j − 1 , k 2 ( y ) , ψ j − 1 , k 1 ( x ) ϕ j − 1 , k 2 ( y ) , ψ j − 1 , k 1 ( x ) ψ j − 1 , k 2 ( y ) } {\displaystyle \{\phi _{j-1,k_{1}}(x)\phi _{j-1,k_{2}}(y),\ \phi _{j-1,k_{1}}(x)\psi _{j-1,k_{2}}(y),\ \psi _{j-1,k_{1}}(x)\phi _{j-1,k_{2}}(y),\ \psi _{j-1,k_{1}}(x)\psi _{j-1,k_{2}}(y)\}} の4つに分解する。そして、 ϕ j − 1 , k 1 ( x ) ϕ j − 1 , k 2 ( y ) {\displaystyle \phi _{j-1,k_{1}}(x)\phi _{j-1,k_{2}}(y)}
結果として、m 回繰り返すと、下記の関数集合が基底関数 となる。
{ ϕ j − m , k 1 ( x ) ϕ j − m , k 2 ( y ) ∣ k 1 ∈ Z , k 2 ∈ Z } ∪ { ϕ j 1 , k 1 ( x ) ψ j 1 , k 2 ( y ) , ψ j 1 , k 1 ( x ) ϕ j 1 , k 2 ( y ) , ψ j 1 , k 1 ( x ) ψ j 1 , k 2 ( y ) ∣ k 1 ∈ Z , k 2 ∈ Z , j − 1 ≤ j 1 ≤ j − m } {\displaystyle \{\phi _{j-m,k_{1}}(x)\phi _{j-m,k_{2}}(y)\mid k_{1}\in \mathbf {Z} ,k_{2}\in \mathbf {Z} \}\ \cup \ \{\phi _{j_{1},k_{1}}(x)\psi _{j_{1},k_{2}}(y),\ \psi _{j_{1},k_{1}}(x)\phi _{j_{1},k_{2}}(y),\ \psi _{j_{1},k_{1}}(x)\psi _{j_{1},k_{2}}(y)\mid k_{1}\in \mathbf {Z} ,k_{2}\in \mathbf {Z} ,j-1\leq j_{1}\leq j-m\}} 3次元以上も同じ。
フィルタバンクによる表現 1レベルの変換 信号 x {\displaystyle x}
下記の関係性を満たす y l o w [ k ] {\displaystyle y_{\mathrm {low} }[k]} y h i g h [ k ] {\displaystyle y_{\mathrm {high} }[k]} x [ k ] {\displaystyle x[k]} ϕ ( t ) {\displaystyle \phi (t)} ψ ( t ) {\displaystyle \psi (t)}
∑ k x [ k ] ϕ ( 2 j t − k ) = ∑ k y l o w [ k ] ϕ ( 2 j − 1 t − k ) + ∑ k y h i g h [ k ] ψ ( 2 j − 1 t − k ) {\displaystyle \sum _{k}x[k]\phi (2^{j}t-k)=\sum _{k}y_{\mathrm {low} }[k]\phi (2^{j-1}t-k)+\sum _{k}y_{\mathrm {high} }[k]\psi (2^{j-1}t-k)} 最初に入力信号列から x [ k ] {\displaystyle x[k]} ハールウェーブレット や Bior2.2 双直交ウェーブレットの場合は、入力信号の解像度と同じ解像度のスケーリング関数を使えば、 x [ k ] {\displaystyle x[k]}
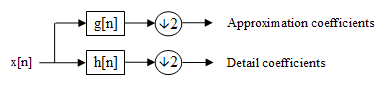
信号は、インパルス応答 が g {\displaystyle g} ローパスフィルタ と、同じく h {\displaystyle h} ハイパスフィルタ を利用して分解される。得られた出力は、ハイパスフィルタから得たものを詳細係数(detail coefficients)、ローパスフィルタから得たものを近似係数(approximation coefficients)とよぶ。これら2つのフィルタは互いに密接な関係があり、直交ミラーフィルタ として知られたものである。
y l o w [ n ] = ∑ k = − ∞ ∞ x [ k ] g [ 2 n − k ] {\displaystyle y_{\mathrm {low} }[n]=\sum \limits _{k=-\infty }^{\infty }{x[k]g[2n-k]}} y h i g h [ n ] = ∑ k = − ∞ ∞ x [ k ] h [ 2 n − k ] {\displaystyle y_{\mathrm {high} }[n]=\sum \limits _{k=-\infty }^{\infty }{x[k]h[2n-k]}} 次に、半分にダウンサンプリングを行う。この分解によって、時間解像度は元の信号の半分になり、周波数解像度は2倍となる。これは、ハイゼンベルクの不確定性原理 を満たしている。
フィルタ解析のブロックダイアグラム ダウンサンプリングのオペレータとして ↓ {\displaystyle \downarrow }
( y ↓ k ) [ n ] = y [ k ⋅ n ] {\displaystyle (y\downarrow k)[n]=y[k\cdot n]} 以上の式をまとめると以下のようになる。
y l o w = ( x ∗ g ) ↓ 2 {\displaystyle y_{\mathrm {low} }=(x*g)\downarrow 2} y h i g h = ( x ∗ h ) ↓ 2 {\displaystyle y_{\mathrm {high} }=(x*h)\downarrow 2} しかしながら、 x ∗ g {\displaystyle x*g}
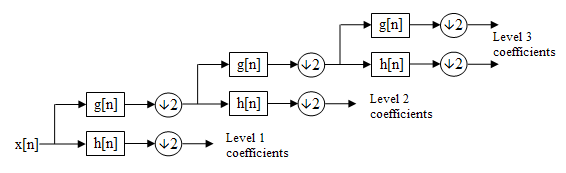
多重解像度解析 この分解は、近似係数を再び分解することによって繰り返され、これを多重解像度解析と呼ぶ。これは、異なる時間周波数の局在性を持った部分空間を枝とする二分木によって表すことが出来る。これはフィルタバンク として知られているものである。
3段階のフィルタバンク 各々のレベルにおいて、低周波と高周波に分解される。 2 n {\displaystyle 2^{n}} ハールウェーブレット の場合は n {\displaystyle n} n {\displaystyle n}
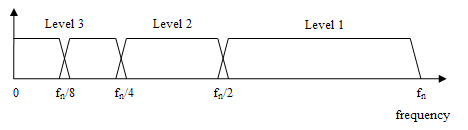
ハールウェーブレット の場合での、32サンプルの信号を例にとる。周波数レンジは0から f n {\displaystyle f_{n}}
レベル 周波数 係数の数 基底関数 3 0 {\displaystyle 0} f n / 8 {\displaystyle {f_{n}}/8} 4 ϕ j − 3 , k {\displaystyle \phi _{j-3,k}} f n / 8 {\displaystyle {f_{n}}/8} f n / 4 {\displaystyle {f_{n}}/4} 4 ψ j − 3 , k {\displaystyle \psi _{j-3,k}} 2 f n / 4 {\displaystyle {f_{n}}/4} f n / 2 {\displaystyle {f_{n}}/2} 8 ψ j − 2 , k {\displaystyle \psi _{j-2,k}} 1 f n / 2 {\displaystyle {f_{n}}/2} f n {\displaystyle f_{n}} 16 ψ j − 1 , k {\displaystyle \psi _{j-1,k}}
多重解像度解析の周波数領域 リフティングスキーム 1996年に Wim Sweldens が新しい離散ウェーブレット変換の計算方法であるリフティングスキーム(英語版) 英 : lifting scheme )を発表した[4] ハールウェーブレット と双直交ウェーブレットを扱える。
定義 閉部分空間の系列 { V j : j ∈ Z } ⊂ L 2 ( R ) {\displaystyle \left\{V_{j}:j\in \mathbf {Z} \right\}\subset L^{2}(\mathbf {R} )} { V j } j ∈ Z {\displaystyle \left\{V_{j}\right\}_{j\in \mathbf {Z} }} A c {\displaystyle A^{c}} A {\displaystyle A}
V j ⊂ V j + 1 , j ∈ Z {\displaystyle V_{j}\subset V_{j+1},\ j\in \mathbf {Z} } ∩ j ∈ Z V j = { 0 } , ( ∪ j ∈ Z V j ) c = L 2 ( R ) {\displaystyle \cap _{j\in \mathbf {Z} }V_{j}=\{0\},\ (\cup _{j\in \mathbf {Z} }V_{j})^{c}=L^{2}(\mathbf {R} )} f ( x ) ∈ V j ⟺ f ( 2 x ) ∈ V j + 1 {\displaystyle f(x)\in V_{j}\Longleftrightarrow f(2x)\in V_{j+1}} f ( x ) ∈ V 0 {\displaystyle f(x)\in V_{0}} f ( x − k ) ∈ V 0 , ∀ k ∈ Z {\displaystyle f(x-k)\in V_{0},\ \forall k\in \mathbf {Z} } ϕ ( x ) ∈ V 0 {\displaystyle \phi (x)\in V_{0}} { ϕ ( x − k ) : k ∈ Z } {\displaystyle \left\{\phi (x-k):k\in \mathbf {Z} \right\}} V 0 {\displaystyle V_{0}} f ∈ V 0 {\displaystyle f\in V_{0}} { a k : k ∈ Z } ∈ l 2 {\displaystyle \left\{a_{k}:k\in \mathbf {Z} \right\}\in l^{2}} f = ∑ k a k ϕ ( x − k ) {\displaystyle f=\sum _{k}a_{k}\phi \left(x-k\right)} C 2 ≥ C 1 > 0 {\displaystyle C_{2}\geq C_{1}>0} { a k : k ∈ Z } ∈ l 2 {\displaystyle \left\{a_{k}:k\in \mathbf {Z} \right\}\in l^{2}} C 1 ‖ a ‖ 2 ≤ ‖ ∑ j a j ϕ ( x − j ) ‖ ≤ C 2 ‖ a ‖ 2 {\displaystyle C_{1}\|a\|_{2}\leq \|\sum _{j}a_{j}\phi (x-j)\|\leq C_{2}\|a\|_{2}} 最後の条件はより厳しい条件として、
5'. ϕ ( x ) ∈ V 0 {\displaystyle \phi (x)\in V_{0}} { ϕ ( x − k ) : k ∈ Z } {\displaystyle \left\{\phi (x-k):k\in \mathbf {Z} \right\}} V 0 {\displaystyle V_{0}} 正規直交基底 となる。 が用いられる事も多い。ここではこの条件5'を用いる。
条件1は空間が入れ子になっていることを意味する。条件2は P j {\displaystyle P_{j}} V j {\displaystyle V_{j}} 射影作用素 とすると、全ての f ∈ L 2 ( R ) {\displaystyle f\in L^{2}(\mathbf {R} )} lim j → ∞ P j f = f {\displaystyle \lim _{j\rightarrow \infty }P_{j}f=f}
閉部分空間の集まりが条件1〜5'を満たすときには、いつでも正規直交ウェーブレット ψ j , k ( x ) = 2 j / 2 ψ ( 2 j x − k ) {\displaystyle \psi _{j,k}(x)=2^{j/2}\psi (2^{j}x-k)} L 2 ( R ) {\displaystyle L^{2}(\mathbf {R} )} { ψ j , k : j , k ∈ Z } {\displaystyle \left\{\psi _{j,k}:j,k\in \mathbf {Z} \right\}} P j + 1 f = P j f + ∑ k ∈ Z ⟨ f , ψ j , k ⟩ ψ j , k {\displaystyle P_{j+1}f=P_{j}f+\sum _{k\in \mathbf {Z} }\left\langle f,\psi _{j,k}\right\rangle \psi _{j,k}}
プログラム例 Python(ハールウェーブレット) ハールウェーブレット の離散ウェーブレット変換は下記のリフティングスキーム(英語版) の数式にて行える[5] x e ( z ) {\displaystyle x_{e}(z)} x[1::2]、 x o ( z ) {\displaystyle x_{o}(z)} x[0::2]。c が低周波成分(基底関数がスケーリング関数)、d が高周波成分(基底関数がウェーブレット関数)。
( c d ) = ( 1 1 / 2 0 1 ) ( 1 0 − 1 1 ) ( x e ( z ) x o ( z ) ) {\displaystyle {\begin{pmatrix}c\\d\end{pmatrix}}={\begin{pmatrix}1&1/2\\0&1\end{pmatrix}}{\begin{pmatrix}1&0\\-1&1\end{pmatrix}}{\begin{pmatrix}x_{e}(z)\\x_{o}(z)\end{pmatrix}}} ハールウェーブレットの離散ウェーブレット変換のソースコードは下記のようになる。入力は x で NumPy の配列で与える。多重解像度解析をしたい場合は、x = c して長さが1になるまで繰り返す。 ϕ n , k ( t ) = 2 n ϕ ( 2 n t − k ) {\displaystyle \phi _{n,k}(t)={\sqrt {2^{n}}}\phi (2^{n}t-k)} c *= sqrt(2) と d /= sqrt(2) をする。
d = x [ 0 :: 2 ] - x [ 1 :: 2 ]
c = x [ 1 :: 2 ] + d / 2
ハールウェーブレットの逆離散ウェーブレット変換のソースコード。
x [ 1 :: 2 ] = c - d / 2
x [ 0 :: 2 ] = d + x [ 1 :: 2 ]
Python(Bior2.2双直交ウェーブレット) Bior2.2双直交ウェーブレット(2階Bスプライン、線形スプライン)の離散ウェーブレット変換は下記のリフティングスキームの数式にて行える[5] z {\displaystyle z} z − 1 {\displaystyle z^{-1}}
( c d ) = ( 1 ( z − 1 + 1 ) / 4 0 1 ) ( 1 0 − ( 1 + z ) / 2 1 ) ( x e ( z ) x o ( z ) ) {\displaystyle {\begin{pmatrix}c\\d\end{pmatrix}}={\begin{pmatrix}1&(z^{-1}+1)/4\\0&1\end{pmatrix}}{\begin{pmatrix}1&0\\-(1+z)/2&1\end{pmatrix}}{\begin{pmatrix}x_{e}(z)\\x_{o}(z)\end{pmatrix}}} Bior2.2の離散ウェーブレット変換のソースコード。配列の境界で足りない分は対称パディングで埋めている。
y = np . pad ( x , ( 4 , 2 ), "symmetric" )
d = y [ 2 :: 2 ] - ( y [ 1 : - 2 : 2 ] + y [ 3 :: 2 ]) / 2
c = y [ 3 : - 2 : 2 ] + ( d [: - 1 ] + d [ 1 :]) / 4
d = d [ 1 :]
Bior2.2の逆離散ウェーブレット変換のソースコード。
x [ 1 :: 2 ] = c [ 1 :] - ( d [: - 1 ] + d [ 1 :]) / 4
x [ 0 ] = 2 * d [ 0 ] + x [ 1 ]
x [ 2 :: 2 ] = d [ 1 : - 1 ] + ( x [ 1 : - 2 : 2 ] + x [ 3 :: 2 ]) / 2
Java もっとも単純な例である。ハールウェーブレット による多重解像度解析をJava で記述した。
/**
* 注意:このメソッドは input 配列を破壊する。
* input.length は2以上の2のべき乗でないといけない。
*/
public static int [] calc ( int [] input ) {
int [] output = new int [ input . length ] ;
// length は 2^n で n は1つずつ減っていく
for ( int length = input . length >> 1 ; ; length >>= 1 ) {
for ( int i = 0 ; i < length ; i ++ ) {
int a = input [ i * 2 ] ;
int b = input [ i * 2 + 1 ] ;
output [ i ] = a + b ;
output [ i + length ] = a - b ;
}
if ( length == 1 )
return output ;
// 次の反復のために配列を入れ替える
System . arraycopy ( output , 0 , input , 0 , length << 1 );
}
}
下記コードは上記を逆ウェーブレット変換する。
/**
* 注意:このメソッドは output 配列を破壊する。
* output.length は2以上の2のべき乗でないといけない。
*/
public static int [] inverse ( int [] output ) {
int [] input = new int [ output . length ] ;
for ( int length = 1 ; ; length *= 2 ) {
for ( int i = 0 ; i < length ; i ++ ) {
int a = output [ i ] ;
int b = output [ i + length ] ;
input [ i * 2 ] = ( a + b ) / 2 ;
input [ i * 2 + 1 ] = ( a - b ) / 2 ;
}
if ( length == output . length >> 1 )
return input ;
// 次の反復のために配列を入れ替える
System . arraycopy ( input , 0 , output , 0 , length << 1 );
}
}
C言語 C言語による、CDF 9/7 ウェーブレット変換(JPEG-2000 で利用)のリフティングを用いた高速な実装は、dwt97.c を参照。
関連項目 参照 ^ Stephane G. Mallat (1989). “A theory for multiresolution signal decomposition: the wavelet representation”. Pattern Analysis and Machine Intelligence, IEEE Transactions on 11 (7): 674-693. doi:10.1109/34.192463. http://www.cmap.polytechnique.fr/~mallat/papiers/MallatTheory89.pdf . ^ DiscreteWaveletTransform—Wolfram言語ドキュメント ^ Single-level discrete 1-D wavelet transform - MATLAB dwt - MathWorks 日本 ^ Wim Sweldens (April 1996). “The Lifting Scheme: A Custom-Design Construction of Biorthogonal Wavelets”. Applied and Computational Harmonic Analysis 3 (2): 186–200. doi:10.1006/acha.1996.0015. ^ a b Lifting Method for Constructing Wavelets - MATLAB & Simulink - MathWorks 日本 



























![{\displaystyle y_{\mathrm {low} }[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/be03de252d1c0df44211e7735029b4a19955a369)
![{\displaystyle y_{\mathrm {high} }[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cebcf243fd78f0520bd10873b2b9ac9326b272ef)
![{\displaystyle x[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/19b6396a35db17413c0052c56544ed76ac0f3b30)


![{\displaystyle \sum _{k}x[k]\phi (2^{j}t-k)=\sum _{k}y_{\mathrm {low} }[k]\phi (2^{j-1}t-k)+\sum _{k}y_{\mathrm {high} }[k]\psi (2^{j-1}t-k)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/33a0cb5f5f9f8f15b83b88ce39f9662b83112217)


![{\displaystyle y_{\mathrm {low} }[n]=\sum \limits _{k=-\infty }^{\infty }{x[k]g[2n-k]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2888626ff63016f7500fcd46ca830fc9a4257f23)
![{\displaystyle y_{\mathrm {high} }[n]=\sum \limits _{k=-\infty }^{\infty }{x[k]h[2n-k]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0771b3bacd7a8fe2f620d96abd981d1867c31269)

![{\displaystyle (y\downarrow k)[n]=y[k\cdot n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d00fefb859513970a8379c490c4f615aaf28dc5f)