A koordinátageometriában a gömbi koordináták vagy térbeli polárkoordináta-rendszer egy háromdimenziós koordináta-rendszer, amiben a pontok helyét az origótól mért távolságuk és két szög adja meg.
Az origó középpontú gömbökön az origótól mért távolság konstans. Így ezeken a felületeken a pontok helyét két szöggel lehet meghatározni. Ezek a gömbi koordináták.[1][2] A gömbi koordináták kifejezést pontatlanul alkalmazhatják az általános esetre és a speciális esetre is.
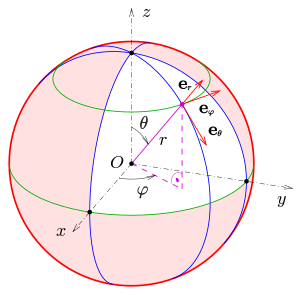
Egy pont gömbi koordinátái és a gömbkoordinátákkal együtt használt Descartes-koordináta-rendszer tengelyei
Egy gömbi koordináta-rendszert a háromdimenziós euklideszi térben a következők határoznak meg:
egy középpont, origó
egy, az origón áthaladó irányított egyenes (pólustengely). Ez tűzi ki a pólus irányát, és ez rögzíti az egyenlítősíkot is, ami az origóban a pólusegyenesre állított merőleges sík
annak pólustengelye a z-tengely (így az x és y-tengelyek az egyenlítősíkban vannak
annak x-tengelye az egyenlítősíkon rögzített irány, így az y-tengely is egyértelműen meghatározott
A matematikában és a fizikában általában a következő koordinátákat használják:
a sugár, a pont origótól mért távolsága
vagy ,[3] polárszög vagy polártávolságszög,[4] a pólusirány és az origóból a ponthoz húzott irányított szakasz szöge. Ez a szög és közötti (0°-tól 180°-ig terjed), és a gömbfelületen egy kört határoz meg.
vagy ,[3] azimutszög,[4] az egyenlítősíkban rögzített irány és az origó és a pont közötti szakasz merőleges vetületének szöge. Ennek nagysága -től -ig (−180°-tól 180°-ig) vagy 0-tól -ig terjed (0°-tól 360°-ig). A hosszúsági szög megfelelője.
Átszámítások
Minden hármashoz hozzá van rendelve egy pont. Koordinátái a fentiek szerint választott Descartes-koordináta-rendszerben:
Ezekbe az egyenletekbe bármely , és koordináta behelyettesíthető. Ahhoz, hogy a koordináták egyértelműek legyenek, korlátozni kell értékeiket. Általában: nemnegatív, értéke illetve [0, 180°] eleme, és a illetve (−180°, 180°], vagy a illetve [0, 360°) intervallumba esik. Vannak pontok, melyeknek így is többféleképpen koordinátázhatók. A z-tengely pontjai esetén tetszőleges. Az origó számára is tetszőleges. Az egyértelműség kedvéért rögzíthetjük, hogy , és az origó esetén .
A többi pont esetén a fentiek szerint választott Descartes-koordináta-rendszerben adott koordinátáikból az gömbkoordináták a következőképpen számíthatók:[5]
Ezek az egyenletek felteszik, hogy értéke és és közötti. Ha értéke 0 és közötti, akkor az egyenleteket ennek megfelelően kell módosítani.
Az analízisben és alkalmazásaiban a szögkoordináták többnyire ívmértékben adják meg.
Alkalmazások
A gömbkoordinátákat gyakran használják forgásszimmetrikus rendszerek vizsgálatára. Példák: térfogatintegrálok gömbön, forgásszimmetrikus erőterek, mint például gömb alakú égitestek gravitációja, egy ponttöltés elektromos tere (lásd még: felszíni integrál). A képleteket egyszerűsíti, ha függetlenek egy vagy két gömbi koordinátától. Fontos parciális differenciálegyenletek, mint például a Laplace-egyenlet vagy a Helmholtz-egyenlet gömbi koordinátákban a változók szétválasztásával könnyen megoldhatók.
Alternatív jelölések
A fenti konvenció nemzetközileg használatos az elméleti fizikában. Néha a és jelöléseket fordítva használják, különösen az amerikai szakirodalomban.
A nem ugyanaz, mint a földrajzi szélesség; inkább ko-szélességként definiálható. A földrajzi szélességet az egyenlítősík és az adott pont helyvektora által bezárt szög, értéke és közötti. Ha ezt jelöli, akkor . Ezzel szemben minden további nélkül megfelel a földrajzi hosszúságnak.
A fenti konvenció inkonzisztens a síkbeli polárkoordináta-rendszer felépítésével. Egyes problémákhoz praktikusabb az
ábrázolás. Ebben az ábrázolásban a földrajzi szélesség.
Egy pont, illetve helyvektor visszatranszformációja:
,
ahol .
Differenciálok transzformációja
Jacobi-mátrix
Egy koordináta-transzformáció helyi tulajdonságait Jacobi-mátrixszal írják le. A gömbkoordináták transzformációját a fenti Descartes-féle koordináta-rendszerbe a következő mátrix írja le:
A hozzá tartozó funkcionáldetermináns:
A transzformáció inverzét legegyszerűbben a mátrix invertálásával számolhatjuk ki:
A mátrix néhány komponense olyan tört, melynek nevezője nullává válik, ha vagy , tehát vagy . Kevésbé szokásos az ábrázolás Descartes-koordinátákkal:
A Jacobi-mátrix lehetővé teszi, hogy a differenciálok átszámítását átláthatóan átírjuk lineáris leképezéssé:
illetve
.
A térfogatelem egyszerűen számítható a
funkcionáldeterminánssal, azaz:
.
A differenciállal kapjuk egy sugarú gömbön a felszínelemet:
.
A vonalelem számítható, mint:
Metrika és forgatómátrix
A vonalelem vegyes tagjainak hiánya visszatükrözi, hogy a metrikus tenzornak sincsenek koordinátái a főátlón kívül:
A metrikus tenzor nyilván a
diagonális mátrix négyzete. Ennek segítségével a Jacobi-mátrix írható úgy, mint , ahol az
forgatómátrix.
Vektormezők és operátorok transzformációja
Egy pont gömbi koordinátái a helyfüggő ortogonális bázissal
A következőkben vektorok és operátorok transzformációit mutatjuk be. Az eredmények leírásánál előnyben részesítjük a kompakt mátrixos formát. A legtöbb kijelentés és képlet a -tengelyen kívüli pontokra vonatkozik, ahol a Jacobi-determináns nem nulla.
A vektortérbázis transzformációja
A koordinátához tartozó bázisvektor adja meg egy pont mozgásirányát, ha a koordinátát a infinitezimális mennyiséggel elmozdítjuk:
.
Ebből
.
Ahhoz, hogy ortonormált bázist kapjunk, még le kell normálni az vektort:
.
Hasonlóan kapjuk az és bázisvektorokra:
Oszlopvektorba írva:
Ezek a bázisvektorok az sorrendben jobbfogású rendszert alkotnak.
A fent bevezetett forgatómátrixszal a transzformációk kompakt módon ábrázolhatók:
.
Mivel ortogonális, azért az inverz transzformáció mátrixa:
.
Az egyes koordinátákhoz tartozó irányokat nevezik radiális, meridionális és azimutális irányoknak. Ezek a fogalmak nemcsak a csillagászatban és a földtudományokban, hanem a fizikában, a matematikában és mérnöki tudományokban is fontosak. Például a Hertz-dipólus esetén, ha az antenna kifeszítésének iránya a -tengely, akkor a sugárzás radiális irányú, míg az elektromos erőtér meridionális, a mágneses erőtér azimutális irányban rezeg.
Vektormező transzformációja
Egy vektornak, mint geometriai entitásnak, függetlennek kell lennie a koordináta-rendszertől:
Ez úgy teljesül, hogy:
illetve .
A parciális deriváltak transzformációja
A parciális deriváltak szintén transzformálódnak, de normálás nélkül. A fentiekhez hasonlóan számolhatunk, de most kihagyjuk a pontot a számlálóból, és a Jacobi-mátrixot alkalmazzuk az forgatómátrix helyett:
,
és az inverz transzformáció:
.
A nabla-operátor transzformációja
A nabla-operátor alakja egyszerű aDescartes-koordináta-rendszerben:
.
A fent levezetett módon transzformálva az egységvektorokat és a parciális deriváltakat:
.
Ebben a formában alkalmazható a transzformált nabla-operátor egy gömbkoordinátákkal adott skalármező gradiensének számítására.
Egy gömbi koordinátákkal adott A vektormező divergenciájának kiszámításához tekintetbe kell venni, hogy a nemcsak az együtthatókra, hanem az A-ban implicit jelenlevő bázisvektorokra is:
Ugyanerre a rotáció számításánál is ügyelni kell:
A Laplace-operátor transzformációja
Ha az A vektormező divergenciaoperátorát behelyettesítjük a gradiensoperátorba, akkor a Laplace-operátorhoz jutunk:
.
illetve
.
Általánosítás további dimenziókra
A gömbi koordináták egy általánosítása dimenzióra:
Belátható, hogy ez az esetben a polárkoordinátákat és esetén a gömbkoordinátákat adja.[6]
A szögek számítása:
Átszámozással rekurziós képletet kapunk a szögekre:
Ahonnan adódnak a következő szögek:
ahol és
A sugár:
Az árkusz tangens miatt esetszétválasztás adódik a megfelelő Descartes-koordinátával bezárt szögre, ahol is a képleteket kiterjesztjük az határértékekre is:
Innen látszik, hogy mindig kétdimenziós vektor, ha .
Jacobi-mátrix
A gömbkoordináták Jacobi-mátrixa a fenti számozás szerint:
Determinánsa:
A determináns normája fölötti integrál kifejezhető a -függvény segítségével:
ami megfelel az -dimenziós hipergömb térfogatának:
Példák
2D:
3D:
4D:
Egy részletes példa
Az esetben a tengelyekkel:
Ekkor a szögek:
Funkcionáldetermináns
A gömbi koordináták transzformációjának Descartes-koordináta-rendszerbe:[6]
Ezzel az -dimenziós térfogatelem:
Jegyzetek
↑Richard Doerfling: Mathematik für Ingenieure und Techniker. Oldenbourg Verlag, Seite 169.
↑F. W. Schäfke: Einführung in die Theorie der speziellen Funktionen der mathematischen Physik. Springer, 1963, ISBN 978-3-642-94867-1, Seite 129.
↑ abLothar Papula: Mathematik für Ingenieure und Naturwissenschaftler. Band 3: Vektoranalysis, Wahrscheinlichkeitsrechnung, mathematische Statistik, Fehler- und Ausgleichsrechnung. 4. verbesserte Auflage. Vieweg + Teubner, Wiesbaden 2001, ISBN 3-528-34937-9.
↑ abArchiválva [Dátum hiányzik] dátummal a(z) www-m8.ma.tum.de archívumban Hiba: ismeretlen archívum-URL. (PDF; 59 kB). Skript an der TU München.
↑Kugelkoordinaten. Mathematik-Online-Lexikon der Universität Stuttgart.
↑ abHerbert Amann, Joachim Escher: Analysis III. Birkhäuser 2008, ISBN 978-3-7643-8883-6, S. 205 (eingeschränkte Online-Kopie a Google Könyvekben-USA).
Forrás
Matroids Matheplanet: Einführung in die Vektoranalysis (als PDF) von Eckard Specht
Fordítás
Ez a szócikk részben vagy egészben a Kugelkoordinaten című német Wikipédia-szócikk fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.
















![{\displaystyle [0,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e2a912eda6ef1afe46a81b518fe9da64a832751)
![{\displaystyle (-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fbb1843079a9df3d3bbcce3249bb2599790de9c)